
Физика
Механическое движение одного и того же тела выглядит по-разному для разных систем отсчета.
Для определенности будем использовать две системы отсчета (рис. 1.33):
- K — неподвижную систему отсчета;
- K′ — подвижную систему отсчета.
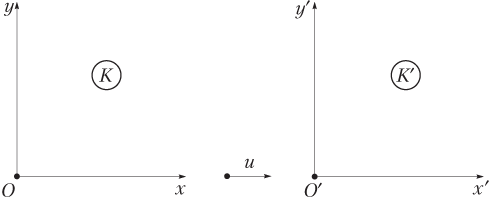
Система K′ движется относительно системы отсчета K в положительном направлении оси Ox со скоростью .
Пусть в системе отсчета K материальная точка (тело) движется со скоростью и за интервал времени ∆t совершает перемещение . Относительно системы отсчета K′ эта материальная точка имеет скорость и за указанный интервал времени ∆t совершает перемещение .
Закон сложения перемещений
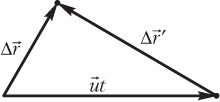
Перемещения материальной точки в неподвижной (K) и движущейся (K′) системах отсчета ( и соответственно) различаются между собой и связаны законом сложения перемещений:
,
где — перемещение материальной точки (тела) за интервал времени ∆t в неподвижной системе отсчета K; — перемещение материальной точки (тела) за интервал времени ∆t в движущейся системе отсчета K′; — скорость системы отсчета K′, движущейся относительно системы отсчета K.
Закону сложения перемещений соответствует «треугольник перемещений» (рис. 1.34).
Закон сложения перемещений при решении задач иногда целесообразно записывать в координатной форме:
где ∆x и ∆y — изменение координат x и y материальной точки (тела) за интервал времени ∆t в системе отсчета K; ∆x′ и ∆y′ — изменение соответствующих координат материальной точки (тела) за интервал времени ∆t в системе отсчета K′; ux и uy — проекции скорости системы отсчета K′, движущейся относительно системы отсчета K, на координатные оси.
Закон сложения скоростей
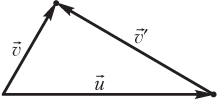
Скорости материальной точки в неподвижной (K) и движущейся (K′) системах отсчета ( и соответственно) также различаются между собой и связаны законом сложения скоростей:
,
где — скорость системы отсчета K′, движущейся относительно системы отсчета K.
Закону сложения скоростей соответствует «треугольник скоростей» (рис. 1.35).
Закон сложения скоростей при решении задач иногда целесообразно записывать в проекциях на координатные оси:
где vx и vy — проекции вектора скорости материальной точки (тела) в системе отсчета K на координатные оси; и — проекции вектора скорости материальной точки (тела) в системе отсчета K′ на координатные оси; ux и uy — проекции скорости системы отсчета K′, движущейся относительно системы отсчета K, на координатные оси.
Относительная скорость движения двух тел
Для определения относительной скорости движения двух тел удобно пользоваться следующим алгоритмом:
1) выяснить, какое из тел считается системой отсчета; скорость этого тела обозначить как
2) скорость второго тела обозначить как ;
3) относительную скорость тел обозначить как ;
4) векторы , и изобразить в системе координат xOy;
5) записать закон сложения скоростей в виде
или
6) выразить :
или и :
7) найти модуль вектора относительной скорости по формуле
,
где vx и vy — проекции вектора скорости материальной точки (тела) в системе отсчета K на координатные оси; и — проекции вектора скорости материальной точки (тела) в системе отсчета K′ на координатные оси; ux и uy — проекции скорости системы отсчета K′, движущейся относительно системы отсчета K, на координатные оси.
Для определения относительной скорости движения двух тел, движущихся вдоль одной координатной оси, удобно пользоваться следующим алгоритмом:
1) выяснить, какое из тел считается системой отсчета; скорость этого тела обозначить как ;
2) скорость второго тела обозначить как ;
3) относительную скорость тел обозначить как ;
4) векторы , и изобразить на координатной оси Ox;
5) записать закон сложения скоростей в виде:
;
6) выразить :
;
7) найти модуль вектора относительной скорости по формуле
,
где vx и vy — проекции вектора скорости материальной точки (тела) в системе отсчета K на координатные оси; и — проекции вектора скорости материальной точки (тела) в системе отсчета K′ на координатные оси; ux и uy — проекции скорости системы отсчета K′, движущейся относительно системы отсчета K, на координатные оси.
Пример 26. Первое тело движется со скоростью 6,0 м/с в положительном направлении оси Ox, а второе — со скоростью 8,0 м/с в ее отрицательном направлении. Определить модуль скорости первого тела в системе отсчета, связанной со вторым телом.
Решение. Подвижной системой отсчета является второе тело; проекция скорости подвижной системы отсчета на ось Ox равна:
ux = −8,0 м/с,
так как движение второго тела происходит в отрицательном направлении указанной оси.
Первое тело относительно неподвижной системы отсчета имеет скорость ; ее проекция на ось Ox равна:
vx = 6,0 м/с,
так как движение первого тела происходит в положительном направлении указанной оси.
Закон сложения скоростей для решения данной задачи целесообразно записать в проекции на координатную ось, т.е. в следующем виде:
,
где — проекция скорости первого тела относительно подвижной системы отсчета (второго тела).
Величина является искомой; ее значение определяется формулой
.
Произведем вычисление:
м/с.
Пример 29. Спортсмены бегут друг за другом цепочкой длиной 46 м с одинаковой скоростью. Навстречу им бежит тренер со скоростью, втрое меньшей скорости спортсменов. Каждый спортсмен, поравнявшись с тренером, поворачивает и бежит назад с прежней скоростью. Какова станет длина цепочки, когда все спортсмены будут бежать в обратном направлении?
Решение. Пусть движение спортсменов и тренера происходит вдоль оси Ox, начало которой совпадает с положением последнего спортсмена. Тогда уравнения движения относительно Земли имеют следующий вид:
- последнего спортсмена —
x1(t) = vt;
- тренера —
;
- первого спортсмена —
x3(t) = L − vt,
где v — модуль скорости каждого спортсмена; — модуль скорости тренера; L — первоначальная длина цепочки; t — время.
Свяжем подвижную систему отсчета с тренером.
Уравнение движения последнего спортсмена относительно подвижной системы отсчета (тренера) обозначим x′(t) и найдем из закона сложения перемещений, записанного в координатной форме:
x(t) = x′(t) + X(t), т.е. x′(t) = x(t) − X(t),
где
—
уравнение движения тренера (подвижной системы отсчета) относительно Земли;
x(t) = x1(t) = vt;
уравнение движения последнего спортсмена относительно Земли.
Подстановка выражений x(t), X(t) в записанное уравнение дает:
.
Данное уравнение представляет собой уравнение движения последнего спортсмена относительно тренера. В момент встречи последнего спортсмена и тренера (t = t0) их относительная координата x′(t0) обращается в ноль:
.
Уравнение позволяет найти указанный момент времени:
.
В этот момент времени все спортсмены начинают бежать в противоположном направлении. Длина цепочки спортсменов определяется разностью координат первого x3(t0) и последнего x1(t0) спортсмена в указанный момент времени:
,
или в явном виде:
м.








