
Физика
Если под действием нескольких сил тело может двигаться не только поступательно, но и вращаться относительно некоторой оси, то при решении задач указанное тело нельзя рассматривать как материальную точку. Для того чтобы абсолютно твердое тело находилось в равновесии, необходимо отсутствие не только линейного, но и углового ускорения центра масс.
Центр масс системы материальных точек (абсолютно твердого тела) не имеет углового ускорения в некоторой ИСО, если результирующий момент всех действующих на систему (тело) сил относительно некоторой точки равен нулю:
.
Результирующий момент нескольких сил — это векторная сумма моментов каждой из сил, действующих на тело:
,
где — момент силы относительно некоторой точки; — момент силы относительно той же точки и т.п.
Для сложения нескольких моментов сил, действующих на тело, используют следующий алгоритм:
1) вычисляют модули моментов каждой из сил по формулам
M1 = r1F1 sin α1,
M2 = r2F2 sin α2,
...,
MN = rNFN sin αN;
2) определяют направление каждого момента по правилу правого винта;
3) выбирают направление предполагаемой оси вращения Oz;
4) находят проекции каждого из моментов на выбранную ось:
- моменты, совпадающие по направлению с осью вращения, имеют положительные проекции;
- моменты, направленные противоположно ей, — отрицательные;
5) сумму проекций моментов относительно оси записывают в алгебраическом виде:
Mz = M1z + M2z + ... + MNz;
6) определяют величину результирующего момента как модуль найденной проекции:
Если абсолютно твердое тело находится в равновесии (покоится относительно выбранной ИСО), то
- точка, через которую проходит предполагаемая ось вращения, выбирается исходя из соображений удобства;
- моменты всех сил, приложенных к телу, рассчитываются относительно одной и той же выбранной точки или оси;
- моменты тех сил, точки приложения которых лежат на выбранной оси, обращаются в нуль.
Именно поэтому при решении задач следует выбирать предполагаемую ось вращения таким образом, чтобы она проходила (перпендикулярно плоскости чертежа) через точку приложения сил, исключенных из рассмотрения в данной задаче.
Когда предполагаемая ось вращения проходит через центр тяжести системы, результирующий момент всех сил тяжести относительно указанной оси равен нулю:
.
Если в центр тяжести поместить опору, то абсолютно твердое тело (система материальных точек) под действием сил тяжести будет находиться в равновесии.
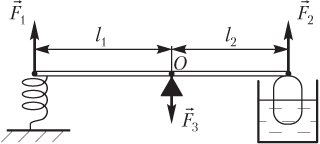
Пример 13. На одном конце горизонтального однородного стержня длиной 4,0 м закреплена точечная масса 0,10 кг, а на другом — точечная масса 0,60 кг. Определить модуль результирующего момента сил тяжести относительно горизонтальной оси, проходящей перпендикулярно стержню через его центр.
Решение. Система состоит из стержня и двух точечных масс, закрепленных на его концах. Стержень является однородным; следовательно, центр тяжести стержня находится в его середине.
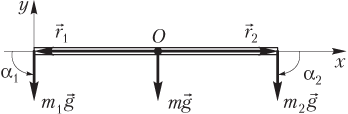
На рисунке показаны:
- сила тяжести, действующая на стержень ;
- сила тяжести, действующая на точечную массу, закрепленную на левом конце стержня ;
- сила тяжести, действующая на точечную массу, закрепленную на правом конце стержня ;
- радиус-векторы и , проведенные от оси вращения к точкам приложения сил и соответственно;
- углы α1 и α2 между парами векторов (, ) и (, ) соответственно.
Модули моментов сил тяжести относительно указанной оси определяются следующим образом:
- стержня —
M = 0,
так как сила приложена к оси вращения, т.е. радиус-вектор, проведенный от оси вращения к точке приложения указанной силы, равен нулю;
- точечной массы, закрепленной на левом конце стержня,
M1 = m1gr1 sin α1,
где m1 — масса, закрепленная на левом конце стержня; g — модуль ускорения свободного падения; r1 = l/2 — модуль радиус-вектора, проведенного от оси вращения к точке приложения силы ; l — длина стержня; — угол между вектором силы и радиус-вектором ;
- точечной массы, закрепленной на правом конце стержня,
,
где m2 — масса, закрепленная на правом конце стержня; r2 = l/2 — модуль радиус-вектора, проведенного от оси вращения к точке приложения силы ; — угол между вектором силы и радиус-вектором .
Направления моментов сил тяжести определим по правилу правого винта:
- для точечной массы, закрепленной на левом конце стержня, — «к нам» (вращение правого винта производим от к по наименьшему углу, т.е. против часовой стрелки);
- для точечной массы, закрепленной на правом конце стержня, — «от нас» (вращение правого винта производим от к по наименьшему углу, т.е. по часовой стрелке).
Направим ось Oz за плоскость чертежа, т.е. «от нас». Тогда проекция момента на указанную ось будет отрицательной, а проекция момента — положительной:
M1z = −M1; M2z = −M2.
Проекция результирующего момента всех сил тяжести системы на указанную координатную ось определяется, таким образом, выражением
Mz = −M1 + M2,
или в явном виде
.
Модуль результирующего момента сил тяжести равен модулю его проекции на указанную ось:
Н ⋅ м
Пример 14. Палочка массой 0,70 кг в виде тонкого однородного цилиндра длиной 60 см и площадью поперечного сечения 3,0 см2 закреплена на оси вращения верхним концом. Нижний конец палочки опущен в воду плотностью 1,0 г/см3 и погружен в нее на 1/3 длины. Вычислить модуль результирующего момента силы Архимеда и силы тяжести относительно горизонтальной оси, проходящей перпендикулярно палочке через ее верхний конец, при отклонении палочки от вертикали на 30°.
Решение. Палочка является однородной, поэтому сила тяжести приложена к ее середине. Сила Архимеда действует только на погруженную в воду часть палочки и приложена к середине погруженной части.
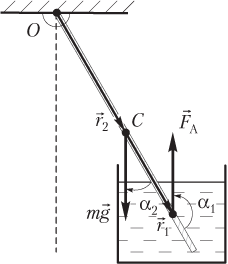
На рисунке показаны:
- сила Архимеда и сила тяжести ;
- радиус-векторы, проведенные от оси вращения к точке приложения силы Архимеда и силы тяжести ;
- углы α1 и α2 между парами векторов (, ) и (, ) соответственно.
Модули моментов силы Архимеда и силы тяжести относительно указанной оси определяются следующим образом:
- силы Архимеда
M1 = FAr1 sin α1,
где — модуль силы Архимеда; ρ0 — плотность воды; g — модуль ускорения свободного падения; — объем погруженной части палочки; V — объем палочки; — модуль радиус-вектора точки приложения силы Архимеда относительно заданной оси; l — длина палочки; α1 = 180° − 30° = 150° — угол между вектором силы Архимеда и радиус-вектором;
- силы тяжести
M2 = mgr2 sin α2,
где m — масса палочки; — модуль радиус-вектора точки приложения силы тяжести относительно заданной оси; α2 = 30° — угол между вектором силы тяжести и радиус-вектором.
Направления моментов силы Архимеда и силы тяжести определим по правилу правого винта:
- силы Архимеда — «к нам» (вращение правого винта производим от к по наименьшему углу, т.е. против часовой стрелки);
- силы тяжести — «от нас» (вращение правого винта производим от к по наименьшему углу, т.е. по часовой стрелке).
Направим ось Oz «к нам». Тогда проекция момента на указанную ось будет положительной, а проекция момента — отрицательной:
M1z = M1; M2z = −M2.
Проекция результирующего момента указанных сил на данную координатную ось определяется, таким образом, выражением
Mz = M1 − M2,
или в явном виде
.
C учетом
- равенства ;
- выражения для объема V = Sl
проекция результирующего момента принимает вид:
,
где S — площадь поперечного сечения палочки.
Модуль результирующего момента указанных сил равен модулю его проекции на указанную ось:
.
Произведем вычисление:
Н ⋅ м.
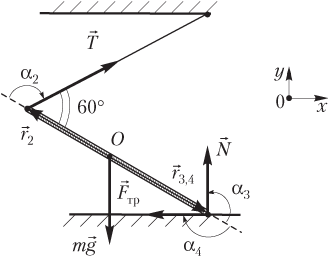
Пример 15. Однородный стержень, подвешенный на нити к потолку за один конец, другим концом касается пола. Стержень и нить имеют одинаковую длину и образуют между собой угол 60°. Определить коэффициент трения между стержнем и полом.
Решение. Под действием сил, показанных на рисунке, стержень находится в равновесии.
Стержень является однородным, поэтому центр тяжести стержня находится в его середине. Однако масса стержня не задана в условии задачи. Следовательно, целесообразно выбрать предполагаемую ось вращения таким образом, чтобы она проходила через середину стержня перпендикулярно плоскости чертежа (точка O).
Запишем условие равновесия стержня относительно указанной оси:
,
где — момент силы тяжести; — момент силы натяжения нити; — момент силы нормальной реакции опоры; — момент силы трения.
Нить и стержень образуют правильный треугольник, поэтому модули указанных моментов определяются следующими формулами:
- силы тяжести
M1 = 0,
так как сила тяжести приложена к оси вращения (радиус-вектор, проведенный от оси вращения к точке приложения силы тяжести, равен нулю);
- силы натяжения нити
M2 = Tr2 sin α2,
где T — модуль силы натяжения нити; r2 = l/2 — модуль радиус-вектора, проведенного от оси вращения (середина стержня) к точке приложения указанной силы (верхний конец стержня); l — длина стержня; α2 = 180° − 60° = 120°;
- силы нормальной реакции опоры
M3 = Nr3 sin α3,
где N — модуль силы нормальной реакции опоры; r3 = l/2 — модуль радиус-вектора, проведенного от оси вращения (середина стержня) к точке приложения указанной силы (нижний конец стержня); α3 = 180° − 60° = 120°;
- силы трения
M4 = Fтрr4 sin α4,
где Fтр = µN — модуль максимальной силы трения покоя; µ — коэффициент трения; r4 = l/2 — модуль радиус-вектора, проведенного от оси вращения (середина стержня) к точке приложения указанной силы (нижний конец стержня); α4 = 180° − 30° = 150°.
Направления моментов указанных сил определим по правилу правого винта:
- силы натяжения нити — «от нас» (вращение правого винта производим от к по наименьшему углу, т.е. по часовой стрелке);
- силы нормальной реакции опоры — «к нам» (вращение правого винта производим от к по наименьшему углу, т.е. против часовой стрелки);
- силы трения — «от нас» (вращение правого винта производим от к по наименьшему углу, т.е. по часовой стрелке).
Выберем направление оси вращения. Ось целесообразно направить в ту сторону, в которую направлено большинство моментов сил; в данном случае — «от нас». Тогда знак проекций моментов сил на указанную ось будет следующим:
- проекции момента силы натяжения нити — положительным: M2z = M2;
- проекции момента силы нормальной реакции опоры — отрицательным: M3z = −M3;
- проекции момента силы трения — положительным: M4z = M4.
Условие равновесия стержня с учетом сказанного приобретает вид:
M2 − M3 + M4 = 0,
или
.
Упрощение дает формулу
T sin 60° − N sin 60° + µN sin 30° = 0.
Дополним систему условием отсутствия поступательного движения центра масс стержня:
,
или в проекциях на координатные оси:
С учетом Fтр = µN полная система уравнений выглядит следующим образом:
Выразим отношение (T/N) из первого и второго уравнений системы:
Равенство левых частей уравнений позволяет записать равенство их правых частей:
.
Искомый коэффициент трения, таким образом, составляет:
.
Пример 16. Легкая лестница длиной 12,0 м приставлена к гладкой стене под углом 45° к полу. Максимальная сила трения между лестницей и полом равна 532 Н. На какую высоту может подняться по лестнице человек массой 75,0 кг, прежде чем лестница начнет скользить?
Решение. Под действием сил, показанных на рисунке, лестница находится в равновесии.
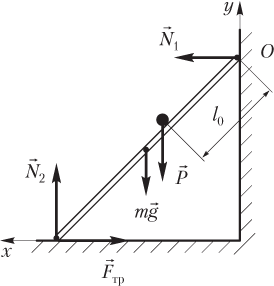
Предполагаемую ось вращения выбираем проходящей через верхний конец лестницы перпендикулярно плоскости чертежа (через точку O).
Запишем условия равновесия лестницы в виде системы уравнений:
где — сила нормальной реакции стены, действующая на верхний конец лестницы; — сила нормальной реакции пола, действующая на нижний конец лестницы; — сила трения между лестницей и полом; — вес человека; — момент силы нормальной реакции стены; — момент силы нормальной реакции пола; — момент силы трения между лестницей и полом; — момент веса человека.
Силу тяжести лестницы считаем равной нулю, так как лестница является легкой; силу трения между лестницей и стеной также считаем равной нулю, так как стена является гладкой.
Модули моментов и их направления определяются следующими формулами:
- силы нормальной реакции стены
M1 = N1 ⋅ 0 = 0,
так как сила нормальной реакции стены приложена к оси вращения;
- силы нормальной реакции пола
,
где l — длина лестницы;
- силы трения
,
где Fтр — модуль максимальной силы трения покоя;
- веса человека
,
где P = Mg — вес человека; M — масса человека; g — модуль ускорения свободного падения; l0 — расстояние от оси вращения до человека.
Пусть ось вращения Oz направлена «к нам», а координатные оси Ox и Oy — так, как показано на рисунке. Тогда условия равновесия в проекциях на координатные оси имеют вид:
Решение системы относительно величины l0 дает:
,
что позволяет рассчитать искомую высоту подъема по формуле
.
Произведем вычисление:
м.
Пример 17. Легкое коромысло длиной 2,4 м закреплено на оси. Одно плечо коромысла длиной 1,4 м на 8,0 см сжимает пружину с коэффициентом жесткости 0,80 кН/м. Другое плечо коромысла топит в воде поплавок массой 1,0 кг. Определить объем подводной части поплавка, если коромысло находится в равновесии. Плотность воды составляет 1,0 г/см3.
Решение. На рисунке показаны плечи коромысла и силы, действующие на него:
- сила упругости , подъемная сила и некоторая сила , возникающая в опоре;
- длинное плечо коромысла l1 (от оси вращения до точки приложения силы упругости), короткое плечо коромысла l2 (от оси вращения до точки приложения подъемной силы).
Под действием указанных сил коромысло находится в равновесии.
Модули моментов силы упругости и подъемной силы относительно оси, проходящей через точку O перпендикулярно плоскости чертежа, определяются следующим образом:
- силы упругости
M1 = F1l1 sin α1,
где F1 = k∆l — модуль силы упругости; k — коэффициент упругости пружины; ∆l — деформация (сжатие) пружины; l1 — длина длинного плеча коромысла; α1 = 90° — угол между вектором силы упругости и радиус-вектором, проведенным от оси вращения к точке приложения силы упругости;
- подъемной силы
M2 = F2l2 sin α2,
где F2 = FA − mg — модуль подъемной силы; FA = ρ0gV′ — модуль силы Архимеда; ρ0 — плотность воды; V′ — объем погруженной части поплавка; m — масса поплавка; g — модуль ускорения свободного падения; l2 = 1,0 м — длина короткого плеча коромысла; α2 = 90° — угол между вектором подъемной силы и радиус-вектором, проведенным от оси вращения к точке приложения подъемной силы;
- силы, возникающей в опоре,
M3 = 0,
так как данная сила приложена к оси вращения.
Направления моментов силы упругости и подъемной силы определим по правилу правого винта:
- силы упругости — «от нас» (вращение правого винта производим по часовой стрелке);
- подъемной силы — «к нам» (вращение правого винта производим против часовой стрелки).
Направим ось Oz «от нас». Тогда проекция момента на указанную ось будет положительной, а проекция момента — отрицательной:
;
.
Проекция результирующего момента указанных сил на данную координатную ось определяется, таким образом, выражением
.
Коромысло находится в равновесии, поэтому проекция результирующего момента на указанную ось вращения равна нулю:
Mz = 0,
или
k(∆l)l1 − (FA − mg)l2 = 0.
Данное уравнение, записанное с учетом явного вида силы Архимеда,
позволяет получить формулу для определения объема погруженной части поплавка:
и рассчитать его величину:
дм3.
Пример 18. Однородный стержень массой 180 кг и объемом 50,0 дм3 лежит на горизонтальном дне сосуда, наполненного некоторой жидкостью. Определить минимальное значение модуля силы, которая может приподнять конец стержня. Плотность жидкости в сосуде составляет 2,00 г/см3.
Решение. Стержень приподнимается вертикальной силой , приложенной к правому концу стержня, как показано на рисунке.
Запишем условие равновесия стержня в следующем виде:
,
где — момент силы нормальной реакции дна сосуда; — момент силы трения; — момент силы тяжести; — момент силы Архимеда; — момент искомой силы, приподнимающей конец стержня.
Все моменты рассчитываются относительно предполагаемой оси вращения, проходящей через нижний конец стержня (через точку O) перпендикулярно плоскости чертежа.
Модули указанных моментов и их направления определяются следующими формулами:
- силы нормальной реакции дна сосуда
M1 = N ⋅ 0 = 0,
так как сила нормальной реакции дна сосуда приложена к оси вращения;
- силы трения
M2 = Fтр ⋅ 0 = 0,
так как сила трения также приложена к оси вращения;
- силы тяжести
,
где m — масса стержня; g — модуль ускорения свободного падения; l — длина стержня; α1 — угол между радиус-вектором, проведенным от оси вращения к точке приложения силы тяжести (середина стержня), и указанной силой;
- силы Архимеда
,
где FA = ρ0gV — модуль силы Архимеда; ρ0 — плотность жидкости; V — объем стержня; α2 — угол между радиус-вектором, проведенным от оси вращения к точке приложения силы Архимеда (середина стержня), и указанной силой;
- силы, способной приподнять конец стержня,
,
где F — модуль искомой силы; α2 — угол между радиус-вектором, проведенным от оси вращения к точке приложения искомой силы (правый конец стержня), и указанной силой.
Пусть ось вращения Oz направлена «к нам». Тогда условие равновесия в проекции на указанную ось:
−M3 + M4 + M5 = 0,
или в явном виде:
.
Упрощение уравнения с учетом равенства
sin α2 = sin(180° − α1) = sin α1
дает:
,
или
.
Произведем вычисление:
Н.
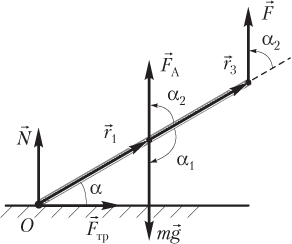
Пример 19. Диск массой 5,2 кг находится на наклонной плоскости с углом при основании 60°. Качение диска предотвращено трением и горизонтально расположенной нитью, которая одним концом прикреплена к вершине наклонной плоскости, а другим — к самой высокой точке диска. Найти модуль силы натяжения нити.
Решение. Под действием сил, показанных на рисунке, диск находится в равновесии.

Предполагаемая ось вращения проходит через точку диска, соприкасающуюся с наклонной плоскостью, перпендикулярно плоскости чертежа (через точку O).
Запишем условие равновесия диска в следующем виде:
,
где — момент силы нормальной реакции наклонной плоскости ; — момент силы трения ; — момент силы тяжести ; — момент силы натяжения нити .
Модули указанных моментов и их направления определяются следующими формулами:
- силы нормальной реакции наклонной плоскости
M1 = N ⋅ 0 = 0,
так как сила нормальной реакции наклонной плоскости приложена к оси вращения;
- силы трения
M2 = Fтр ⋅ 0 = 0,
так как сила трения также приложена к оси вращения;
- силы тяжести
,
где m — масса диска; g — модуль ускорения свободного падения; R — радиус диска;
- силы натяжения нити
,
где T — модуль силы натяжения нити; x — расстояние от оси вращения до точки приложения указанной силы.
Пусть ось вращения Oz направлена «к нам». Тогда условие равновесия в проекции на указанную ось запишем в виде:
mgR sin θ − Tx sin β = 0.
Отсюда следует, что модуль искомой силы натяжения нити определяется выражением
.
Для вычисления модуля силы натяжения нити по данной формуле необходимо установить значение выражения
.
Согласно теореме синусов
;
отсюда следует, что
,
т.е. выражение для вычисления T имеет вид:
.
Определим углы φ и β, входящие в данное выражение.
Угол γ равен углу при основании наклонной плоскости α:
γ = α = 60°.
Из четырехугольника, противоположные углы которого γ и θ, а два остальных — прямые, найдем угол θ:
θ = 360° − 90° − 90° − γ = 180° − 60° = 120°.
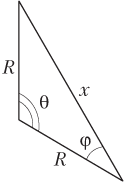
Треугольник, показанный на рисунке, является равнобедренным; следовательно, угол φ определяется формулой
.
Найдем угол β:
β = 180° − 60° = 120°.
Подстановка углов φ и β в выражение для вычисления модуля силы натяжения нити дает:
.
Произведем вычисление:
Н.








